Yuki UENO
| Name | Yuki UENO |
| Department/Research Field | Master’s Program in Computer Science/Robotics |

| Research content |
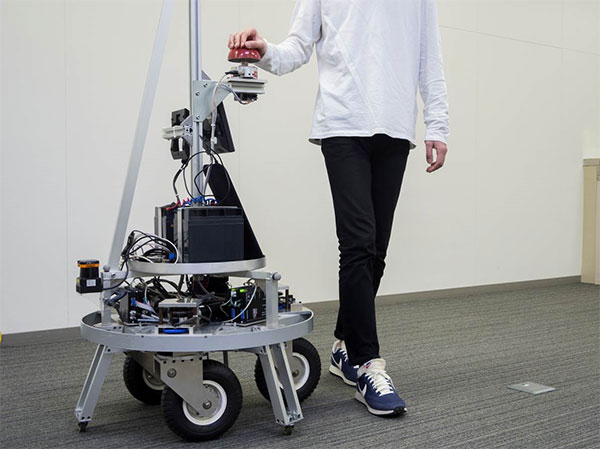
| Power-assist systems allows an operator to control a robot with a small operational burden. However, the position control based power-assist system is known that the system will be unstable if the external environment has high stiffness. In the power-assist system for transport equipment, since the external environment becomes the operator, degradation of operability happens depending on the dynamic characteristics of the person. In this research, an analysis method of operator dynamic characteristics, and an improve method using them are considered to realize more comfortable power-assist operation. |
 |
| Research theme |
1. Development of Omni-Directional Mobile Mechanism |
| Research keywords |
| Mobile Robots , Power-Assist System |
| Lab link |