Yuki Ueno
| Name | Yuki Ueno |
| Department/Research Field | Robotics, Mechatronics |

| Research content |
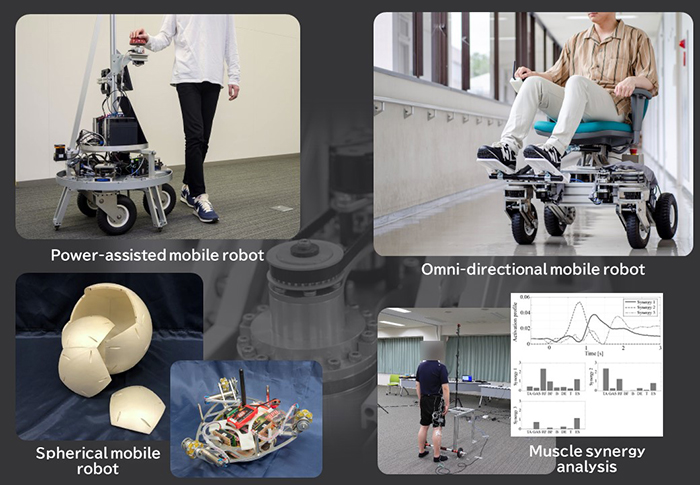
| Omni-directional mobile mechanisms and mobile robots that enables to travel over the difference in level or running over the rough terrain are developed. To reduce the physical burden on an operator of the mobile robot, power assist system is developed. Furthermore, to improve the operability and to realize a safe operation system, an operation support system based on the animal locomotion principle is studied. In addition, to understand human characteristics during robot manipulation, analysis using muscle synergy that can be obtained from surface electromyography and 3D-motion data is conducted. |
 |
| Research theme |
1. Omni-Directional Mobile Mechanism with High Traveling Performance Over Rough Terrain |
| Research keywords |
| Mobile Robot , Power-Assist System , Muscle Synergy |
| Lab link |