プロジェクトRでの役割を教えてください
安達:プロジェクトリーダーを担当し、学生ロボコンの本番ではチームの統率・指令役を務めました。この役割を志願したのは、自分がやることで他のメンバーの負担を少しでも減らしたいと考えたから。みんなの期待に応えられたかどうかは自分では分かりませんが。
梅村:安達さんはメンバーの意見を尊重しながらチームを引っ張ってくれるので、とても活動しやすかったです。私自身の主な担当はR1の制御と操縦です。前回大会でもロボットの操縦を担当して悔しい負け方をしたので、リベンジに燃えて大会に臨みました。
赤崎:梅村さんは前回も今回も標的を狙い撃ちするロボットの操縦で活躍したことで、「スナイパー梅村」の異名がロボコンファンに知れ渡りました。他校にとっては脅威だし、味方にとっては心強い存在です! 僕はR2の制御・回路を担当し、大会では操縦も担当しました。多機能な機体ですので改良や練習には相当な時間を掛けました。
梅村:赤崎さんの操縦も、大会では見事でしたよ!
安達:確かに。そのほか、どのメンバーもいろいろな仕事を兼任していて、例えば僕はR2の移動機構を担当していますし、書類作成も大切な仕事です。梅村さんは予算や発注管理もやってくれ、赤崎さんは加工機を管理するなど、チーム運営に必要な多くの作業をみんなで分担しています。今日は我々3名が代表として集まっていますが、チーム全員の総合力がプロジェクトを支えているんです。
学生ロボコン2022参戦マシンの長所や注目のポイントは?
安達:僕たちが目ざしたのは、毎試合75点獲得のパーフェクト勝利を狙える機体にすることです。この方針のもと、ラゴリの積み上げ、展開、ボールの射出や回収など、あらゆる性能を磨きました。長所はいろいろありますが、僕はR2の「ラゴリ倒し機構」が気にいっています。随所に知恵や工夫が詰まっていて、目立つ機構ではありませんが本番でも大活躍しました。
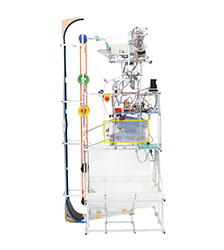
梅村:R1のボールの射出機構は、試作機で2輪ローラーだったものを3輪に変えたことで高精度を実現した自慢のメカニズムです。そのほか注目してもらいたいのはボール昇降機構ですね。シンプルなメカニズムですが期待以上の性能で安定して動く。優れた機械のお手本だと思います。
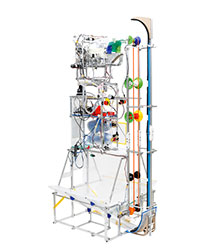
赤崎:一度に3つのラゴリをつかめるR2の積み上げ機構と、ボールラックからボールをまとめて回収する機構が気に入っています。大会の3試合では、ほぼノーミスでボールを回収してR1に供給でき、スナイパー梅村の仕事を陰で支えることができました。
梅村:感謝してます!
2022大会の感想を聞かせてください
安達:僕は今回初めて会場で競技に参加したのですが、驚いたのは音の大きさです! テレビ番組を盛り上げるためなのか、スピーカーから流れるBGMや司会者の声に圧倒されました。試合に関して良かったことは練習の成果を存分に出せたこと。初戦を無事に終えた時点で「今回は良いところに行けるかも」と手応えを感じました。
梅村:大会前に実戦を想定したシミュレーションを100回ぐらい行ったし、シード権も持っていたので、自分たちを信じて試合に臨みました。昨年はコロナで無観客でしたが、今回は大勢の人がいて注目を浴びている感覚がありました。
赤崎:ピットクルーだった去年と違い、ロボット操縦を担当した今回は、脈拍が上がるのが分かるほど緊張しました。でも試合が始まったら冷静に戦うことができました。常勝校をあと一歩まで追い詰めることもでき、自分たちの成長と進化を実感しました。
安達:勝つチャンスがあったからこそ、正直悔しさも残りましたね。戦略的な部分を強化する重要性を痛感しました。
梅村:相手に勝利することをもっと意識して行動すれば、結果は良くなるはずです。とは言え、ライバル校とは「技術者仲間」という意識でつながっていますから、単なる倒すべき相手ではないんです。
赤崎:そう。試合前にマシンを見せ合ったり、大会後に交流したり。同じロボットを愛する者どうしの絆やリスペクトを感じられる点もロボコンの良いところです。
プロジェクトRの魅力はどんなことですか
赤崎:プロジェクトRはもともと大学の戦略的教育プログラムとしてスタートした活動なので、大学の正式な支援を受けられることが魅力です。金銭面の援助だけでなく、プロジェクト専用のスペースや多彩な工作機械を自由度高く使うことができ、幅広い実践的スキルを身につけるうえでもメリットは大きいです。
梅村:先生が大会の応援に来てくれるなど、大学を挙げてサポートしてくださっていることを実感できるのは頼もしいですね。活動を通じて授業の内容より高度な応用を学べますし、機械工学の多様な知識を単体ではなく組み合わせて習得できます。
安達:僕はチームでの開発を学べる点に最大の魅力を感じます。実社会での仕事はすべてチームで行われることを考えると、プロジェクトRはまさに本学の「実学主義」を体現している取り組みだと思います。
赤崎:同感。それに加えてプロジェクトRが伝統的に美点としているのは、チーム全員でアイデアを出し合うことで「独創的なマシン作り」を実践していることです。ただユニークなだけでなく「面白くて強い」。そこに常にこだわっている点が東京工科大らしさであり誇れる強みなんです。
後輩や高校生へのメッセージを聞かせてください
安達:ロボットは面白そうだけど、知識がないし、機械を作った経験もないから難しいと思う人がいるかも知れません。でも、ここにいる3人も最初はロボット初心者でした。それが、ロボット製作の基礎知識や加工機の使い方などを一つずつ先輩に教わって、2年間で全国で戦えるまでに成長しました。ですからチームでプロジェクトを動かしたい人、新しいものを開発する力をつけたいという人は、ぜひ仲間に加わってほしいですね。
赤崎:プロジェクトRでは、チームの一員として実践的な作業経験を積みながら着実にステップアップできます。ロボット作りは自分と自分の生活を変えるきっかけになるもの。僕は人生にロボットという要素が加わったことで自信がつき、充実した日々を過ごせています。僕たちの取り組みが気になったら、オープンキャンパスで確かめてください!
梅村:私は自分の人生で、プロジェクトRほど夢中になってのめり込んだものは他にありません。入学時にはまさか自分が全国大会に出場してベスト4に進むなんて想像もしていませんでした。でも今では何よりも大切なものだし、本当に貴重な経験ができていると感じています。ロボット作りやもの作りに、女子も男子も関係ありません。少しでも興味があるならチャレンジしないともったいない! 大学時代は一番やりたいことを学べる大切な時間なのですから。